宏硕智能装备
电话:15562209960 微信:15562209960 邮箱:sdhsznzb@163.com 地址:山东省滕州市善南街道经济开发区腾飞西路555号什么是伺服?
交流伺服电机的最大特征要素是伺服机构。能被称为“伺服电机”的,除了交流伺服电机,还有直流伺服电机及RC伺服电机等。下面说明它们的不同点和特征,简单介绍一下伺服机构不可或缺的位置/速度检测机构。
伺服机构与伺服电机
伺服机构是以物体的位置、方位、姿态等控制量,跟随目标(或给定值)变化的自动控制系统。伺服的英文“servo”以拉丁语中表示“奴隶”的“servus”为词根,意思是按照指令动作的控制。
直流伺服电机
一般而言,直流伺服电机与直流电机是被区别对待的。直流伺服电机的优缺点整理如下。
直流伺服电机的优点:
(1)小型轻量,效率高。
(2)适合低电压工作。
(3)采用高性能永磁体可以得到高效率/大功率。
(4)电机与伺服放大器的系统价格较低。
(5)通过反馈,旋转精度及定位性能等基本性能很高。
直流伺服电机的缺点:
(1)要根据负载进行伺服控制。
(2)存在电刷磨损,需要保养。
(3)电刷磨损会产生粉尘,不适用于洁净环境。
(4)会产生机械及电机噪声。
无铁心直流电机,很多厂商将其用于直流伺服电机。无铁心直流电机的特点如下:
(1)转子惯量小。
(2)电机线圈的电感小,整流特性好。
(3)不产生齿槽转矩。
直流伺服电机虽然有电刷与换向器接触的缺点,但基本性能可以匹敌交流伺服电机,用途也与之十分接近。而且,它们在电机及伺服放大器的设计与制造方面有很多共同点,很多厂商把直流伺服电机和交流伺服电机放在一起销售。
RC伺服电机
RC伺服在广义上也算是直流伺服电机,但是其特性及应用领域与直流伺服电机有所区别。RC伺服电机多用于遥控模型的转向控制,使用电位计(可变电阻器)检测位置,旋转角度能达到180°。
图1.5所示为RC伺服系统示意图。如图1.5(a)所示的框图,RC伺服电机由控制器和电机组成,控制器包含位置偏差检测电路、电机驱动放大器及单稳态多谐振荡器,电机部分包含直流电机和电位计。
RC伺服系统的工作原理可用图1.5(b)所示的时序图来说明。目标位置由外部PWM信号指定,信号周期为20ms,脉宽为1~2ms(具体参数以RC伺服电机数据表为准)。

图1.5 RC伺服系统示意图
接下来是位置检测,根据电机内置电位计的阻值,单稳态多谐振荡器输出脉宽变化。位置检测的脉宽与目标位置一致,范围为1~2ms。
检测位置未达到目标位置,位置偏差检测电路输出正转脉冲。若检测位置通过了目标位置,则输出反转脉冲。
电机驱动放大器根据正转脉冲和反转脉冲的位置偏移脉宽,确定直流电机的驱动电压极性和驱动时间。之后,通过位置反馈,RC伺服电机定位于目标位置。再者,伺服增益的调整通过电机驱动放大器完成,测量偏差脉冲,调整驱动时间。
RC伺服电机的优点
(1)广泛用于玩具,所以廉价。
(2)设计为电池驱动,适合低电压工作。
(3)小型轻量。
RC伺服电机的缺点
(1)需要调整单稳态多谐振荡器。
(2)存在电刷磨损,需要保养。
(3)电刷磨损会产生粉尘,不适用于洁净环境。
(4)会产生机械/电机噪声。
(5)伺服周期大约为20ms(交流伺服电机在1ms左右),略为粗放,振荡明显。
位置检测装置
伺服机构依赖反馈控制,需要位置或速度检测机构。不论是硬件方式,还是软件方式,概不例外。交流伺服电机最擅长控制位置,但也离不开位置检测装置。下面介绍几种典型的位置检测装置。
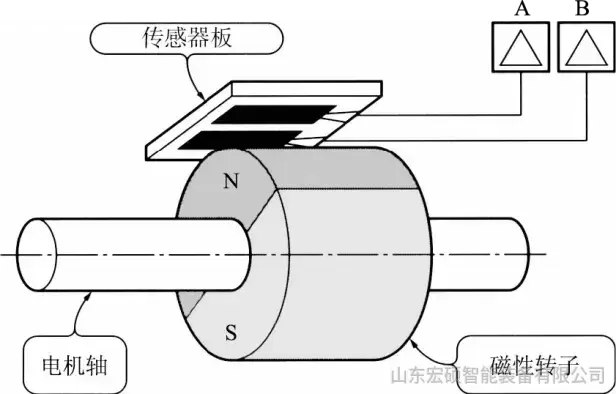
磁编码器
图1.6所示为磁编码器的结构示意图。电机的轴上装有多极永磁体。该永磁体不是驱动用的,而是编码器专用。传感器板上的传感器元件有磁阻型(MR)与霍尔型两种。对传感器输出的正弦波状两相信号(sin/cos)进行插值处理,能得到高分辨率位置信息。
磁编码器的主要特点如下:
(1)小型。
(2)MR型可以实现高分辨率。
(3)霍尔型很难实现高分辨率(要调整每个元件)。
(4)比较便宜。
光电编码器
图1.7所示为光电编码器的结构示意图。电机轴上固定有高精度码盘,码盘上有许多光学狭缝。光电晶体管检测通过狭缝(遮光板)的发光二极管(LED)发射的光,将狭缝位置转换成电信号。码盘旋转,便可得到连续脉冲列。这里以增量式光电编码器为例,另外还有绝对值编码器。
光电编码器的主要特点如下:
(1)能实现高分辨率
(2)位置再现性好(高精度)
(3)增量式编码器相对便宜
(4)绝对值编码器相对昂贵

旋转变压器
图1.8所示为旋转变压器的结构示意图,旋转变压器的转子与电机转子直连。在励磁侧(—次侧)施加交流电压,转子旋转时在相差90°配置的输出侧(二次侧)便可得到sin/cos信号。由于sin/cos信号的品质高,因而可以用于高分辨率的绝对值编码器。
旋转变压器的主要特点如下:
(1)结构坚固,适合工业用途。
(2)无主动元件,耐用性高。
(3)能检测转子位置绝对值,不需要其他传感器
(4)伺服放大器侧要有交流振动电路及插值处理电路

交流伺服电机的系统组成
图1.9是交流伺服电机的系统构成图,主要分为上位控制器、伺服放大器和电机三部分。另外,交流伺服电机除了图1.9所示的结构,有些系统还将上位控制器用于位置反馈的,伺服放大器用于速度控制,或者在电机外部进行位置检测。

上位控制器
生成电机动作轨迹,向伺服放大器发出指令。其接口一般适用脉冲列,每发送1个脉冲指令,伺服电机便像步进电机一样旋转一定角度。因此,上位控制器也可以用于步进电机。各厂商的接口已经统一,并非一定要选电机同品牌的上位控制器。不过,本专栏介绍的交流伺服驱动器已将上位控制器和伺服放大器设计为一体了,不需要单独的上位控制器。
伺服放大器
伺服放大器由伺服控制器与电机驱动放大器组成。交流伺服电机的伺服控制几乎都是数字控制,采用高性能的DSP或者微控制器。电机驱动放大器则是采用矢量控制三相正弦波PWM驱动。
理解这些控制技术是关键。
交流伺服电机
交流伺服电机由电机与位置检测装置组成。要控制电机,首先要加深对电机的理解。